|
I am a PhD student at the 3D AI Lab at Technical University of Munich. Previously, I graduated from Robotics, Cognition, Intelligence at TUM. My research interests are in the field of 3D computer vision, CAD-driven scene understanding, and 3D generative modeling. Email / Google Scholar / Github / LinkedIn |

|
|
|

|
Xinyi Zhang, Daoyi Gao, Naiqi Li, Angela Dai arXiv, 2025 project page / paper We introduce ProcGen3D, a new approach for 3D content creation by generating procedural graph abstractions of 3D objects, which can then be decoded into rich, complex 3D assets. |

|
Daoyi Gao, Yawar Siddiqui, Lei Li, Angela Dai CVPR, 2025 project page / paper / code We proposed a hierarchical transformer-based approach to generate articulated 3D meshes with clean, compact geometry. |


|
Daoyi Gao, Dávid Rozenberszki, Stefan Leutenegger, Angela Dai SIGGRAPH, 2024 project page / paper / code We proposed a weakly-supervised approach for CAD model retrieval and alignment from an RGB image. Our approach utilzes diffusion models to tackle the ambiguities in the monocular perception, and achives robuts cross-domain performance while only trained on synthetic dataset |
|
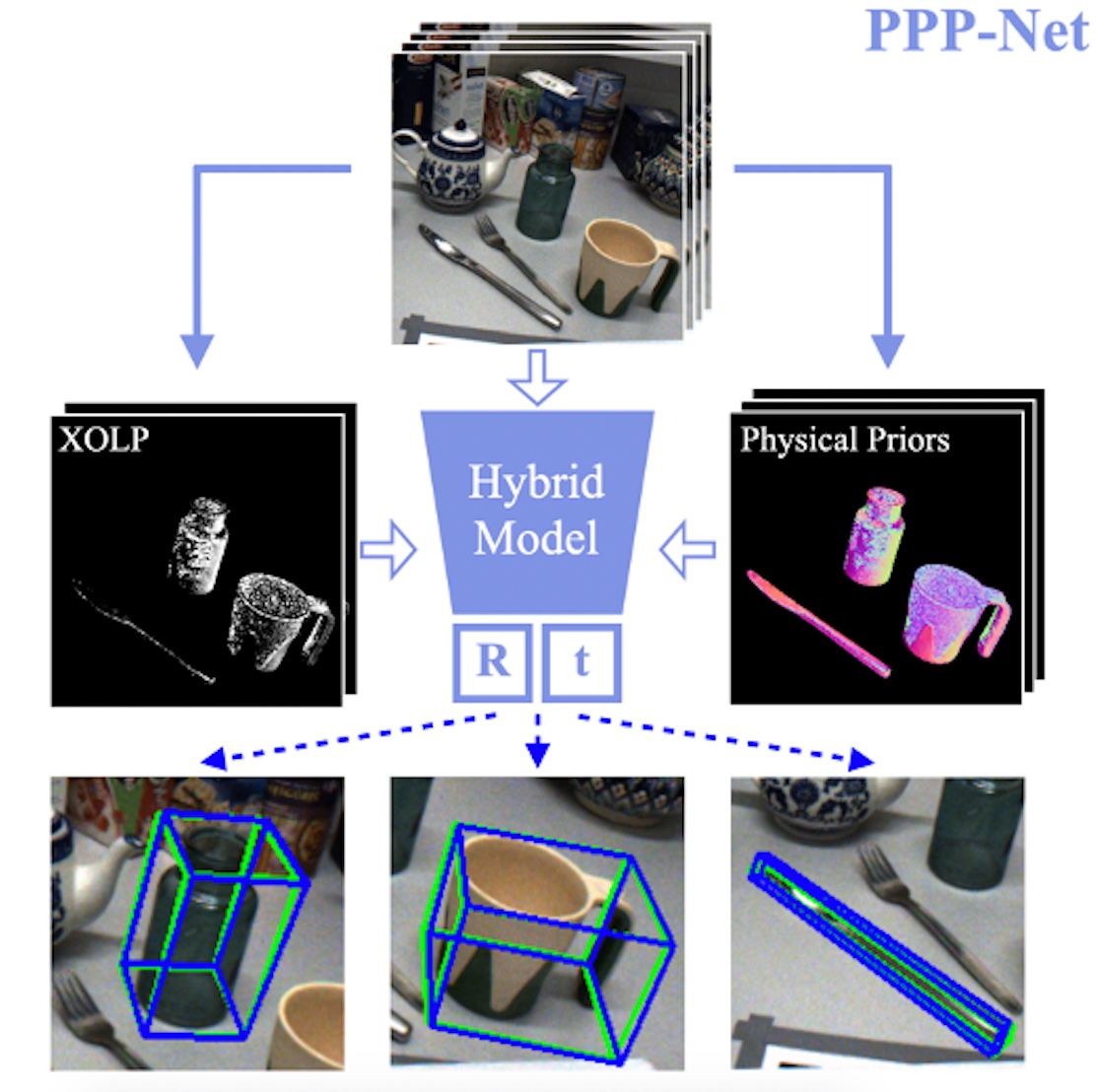
Daoyi Gao*, Yitong Li*, Patrick Ruhkamp*, Iuliia Skobleva*, Magdalena Wysock*, HyunJun Jung, Pengyuan Wang, Arturo Guridi, Benjamin Busam ECCV, 2022 project page / paper / code We proposed a hybrid model that utilizes polarizaiotn information with physical priors in a data-driven learning strategy to improve the accuracy of pose predictions for photometric challenging objects. * Equal contribution. Alphabetical order. |

|
Patrick Ruhkamp*, Daoyi Gao*, Hanzhi Chen*, Nassir Navab, Benjamin Busam 3DV, 2021 project page / paper / code We proposed a self-supervised monocular depth estimation pipeline that aims to improve consistency while preserving accuracy. We also proposed a new Temporal Consistency Metric (TCM) to quantify depth consistency across frames. * Equal contribution. Order determined randomly. |
|
|
|
1st Workshop on Urban Scene Modeling: Where Vision Meets Photogrammetry and Graphics
CVPR, 2024 |
|
|
 |
Teaching
Assistant, Machine Learning for 3D Geometry (IN2392) WS 2023/2024, SS 2024, WS 2024/2025, SS 2025, WS 2025/2026
Teaching Assistant, Techniques in Artificial Intelligence (IN2062) WS 2021/2022 Teaching Assistant, Introduction to Deep Learning (IN2346) SS2020, WS 2020/2021 Teaching Assistant, Block Seminar Hands-on Deep Learning SS2020 |
|
Credicts: Jon Barron |